Summary
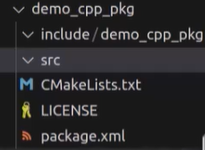
从零创建
包中
src下编写节点
CMakeLists. txt中声明:添加可执行文件,找到并包含头文件库文件,移动可执行文件到install下构建功能包
setup. bash补全路径
创建新的功能包
ros2 run create --build-type ament_cmake --liscence Apache-2.0 demo_cpp_pkg
结果: ****
编写功能包(编写节点与声明)
在 src 下创建节点 cpp_node.cpp
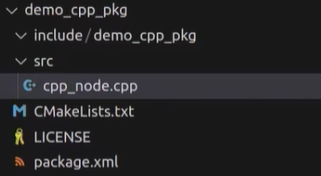
内容直接用 节点内容
声明
cpp_node.cpp 是通过 CMakeLists. txt 构建的, 在原本基础上添加依赖。添加内容
add_executable (cpp_node src/cpp. node)
find_package (rclcpp REQUIRED)
ament_target_dependencies(cpp_node rclcpp)
#代替两行代码:
#target_include_directories(cpp_node PUBLIC${rclcpp_INCLUDEDIRS})#头文件包含
#target Link Libraries(cpp_node ${rclcpp_LIBRARIES})# 库文件链接
install(
TARGETS cpp_node
DESTINATION lib/${PROJECT_NAME}
)
#把cpp_node 从build目录复制到install/demo_cpp_pkg目录下对应路径。这里是lib/cpp_node_pkg,如图构建功能包后,会创建lib/cpp_node_pkg/cpp_node
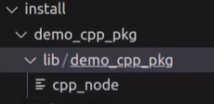
构建功能包
colcon build
(构建路径下所有功能包)
注意,这个命令包含了 cmake . make 的全过程,类似于用高级命令把 c++构建多个节点的过程自动化了。
补全环境变量
source install/setup.bash
运行功能包下节点
ros2 run demo_cpp_pkg cpp_node