Summary
从零创建
包中
__init__同级编写节点
setup. py中声明,指向 main 函数构建功能包,只剩 install
setup. bash补全路径
创建新的功能包
ros2 pkg create demo_python_pkg --build-type ament_python --license Apache-2.0
Note
使用 ROS 2 命令行工具,创建一个名为 demo_python_pkg 的 Python 软件包,使用 ament_python 构建系统进行构建,并采用 Apache-2.0 许可协议。
⚠️upload failed, check dev console ⚠️upload failed, check dev console ⚠️upload failed, check dev console
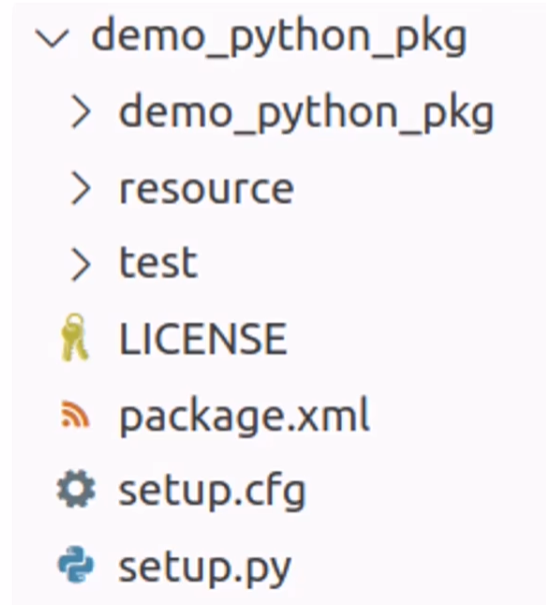
创建完成,生成文件如图:
编写功能包
创建节点 python_node.py
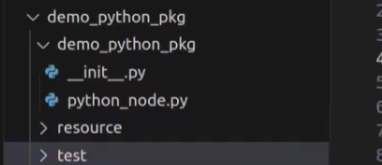
内容如下:
import rclpy
from rclpy.node import Node
def main():
rclpy.init()
node = Node('python_node') #节点名:python_node
node.get_logger().info('Hello from Python ROS2 Node!') #日志打印
node.get_logger().warn('This is a warning message.')
rclpy.spin(node) #ROS2启动,持续运行
rclpy.shutdown()
#不运行main函数,因为ros2构建会生成可执行文件调用main()声明
在 setup. Py 中声明
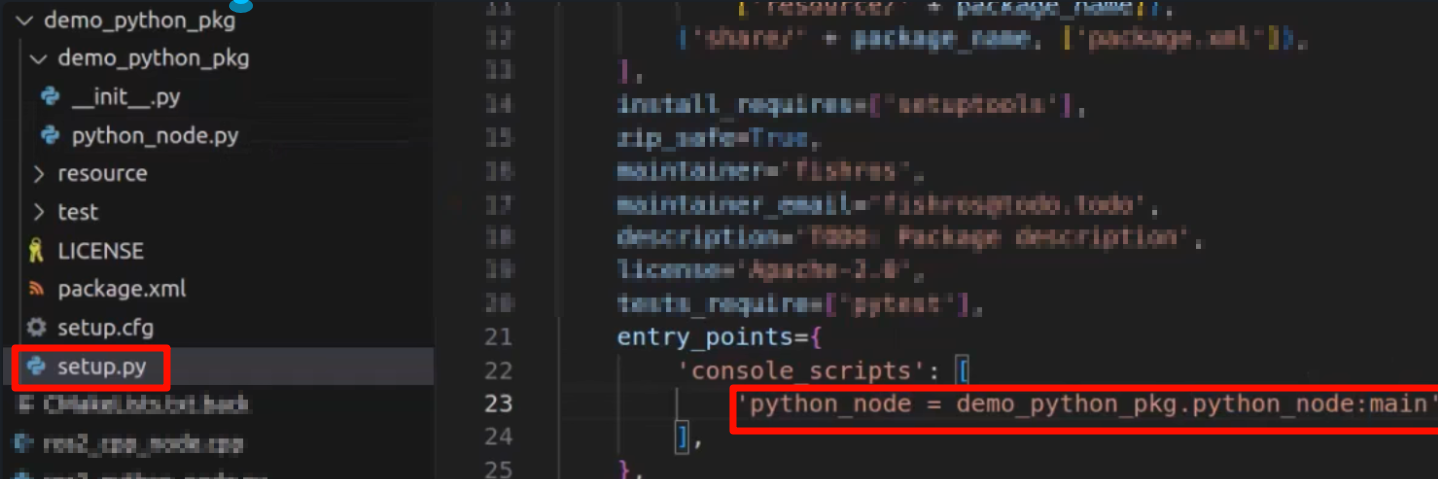
’ 节点名 = 功能包名. 节点名. 函数名 ’
在功能包清单文件 package. Xml 中添加依赖 (非必要)
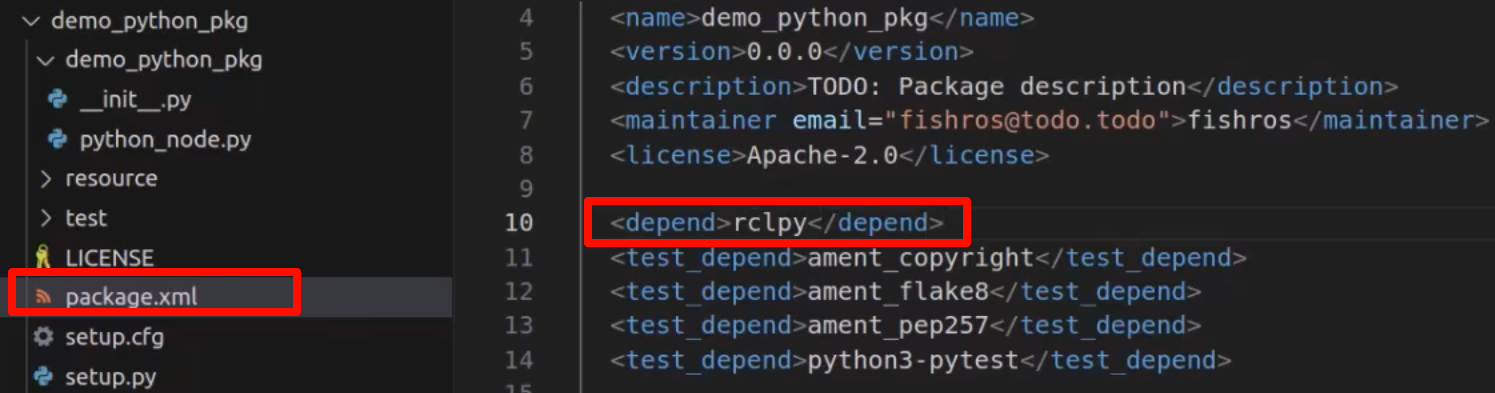
功能包依赖 rclpy
构建功能包
colcon build
Note
colcon build命令是 Colcon 构建工具 的主要命令,用于编译和构建你的 ROS (机器人操作系统) 或者其他基于 CMake 的项目。简单来说,它做以下事情:
- 找到你的所有软件包 (package): Colcon 会扫描你的工作空间,寻找包含
CMakeLists.txt的文件夹,这些文件夹被认为是软件包。- 解决依赖关系: 它会分析你的软件包之间的依赖关系,确保按照正确的顺序构建它们。
- 编译代码: 它会使用 CMake 和你的编译器 (例如 GCC 或者 Clang) 来编译你的 C++, Python 或其他语言的代码。
- 安装文件: 它会将编译后的文件 (例如可执行文件、库、Python 模块) 安装到你指定的位置。
总结:
colcon build就是 构建和安装你所有 ROS 项目中的代码,让它们可以运行。 类似与make命令,但更强大,能够处理复杂的项目结构和依赖关系。举个例子:
假设你有一个 ROS 工作空间,里面有两个软件包
package_A和package_B, 并且package_B依赖于package_A。 运行colcon build后, Colcon 会先构建package_A, 然后构建package_B, 确保它们都正确编译和安装。
Python 中只是对文件拷贝并加上一层包装
新生成 3 个文件夹 build (构建过程中间文件)/install(构建结果文件夹)/log
注意注意,进行到这里,install 文件为最终单独有用的文件 把 install 文件复制给别人,别人就可以直接运行功能包了
Install 文件内部:
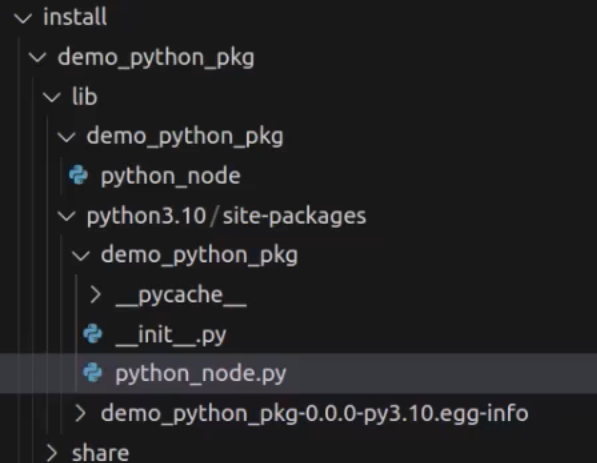
可执行文件 python_node 中运行的 main () 函数为 install 文件夹下 python_node. py 中的 main 函数,而非构建功能包前 demo_python_pkg 下的 python_node. py 中的 main 函数
补全环境变量路径
目前运行可执行文件无法运行,找不到 main () 函数所在文件 python_node.py 上一层级的包 demo_pyhon_package, 需要自主添加路径
Python 功能包根据环境变量 PYTHONPATH 找包,故在 PYTHONPATH 上增加路径
手动添加
命令:export PATHONPATH = /home/wzy/chapt2/install/demo_python_pkg/lib/python3.10/site-package:$PYTHONPATH
自动添加
命令:source install/setup.bash , 自动添加环境变量 PATHONPATH 路径
运行功能包中节点
ros2 run demo_python_package python_node