Ubantu 安装
先安装虚拟机 Vmware Pro 17
在虚拟机上安装 ubantu 系统,版本为ubuntu-22.04.5-desktop-amd 64. Iso
请不要安装其他版本,容易出现难以解决的报错
链接
ROS 安装
下载完成 ubantu 系统后,在 ubantu 中安装 ROS 2,我采用的是“鱼香 ROS 的一键安装工具 ”
链接
提示
- 终端的打开方式为:ctrl+alt+T
- ros2没有roscore,执行直接输ros2 run turtlesim turtlesim_node就行
- 该版本对应的 ROS 版本为 humble(如图)
完全跟着教程,我们完成了 ROS 2 的配置
Moveit 安装
教程
跟着教程安装就好了,几点提示:
提示
- 网络问题。虚拟机可以共享电脑上的梯子。打开梯子,在终端输入ping github.com,运行一段时间后ctrl+c退出,再运行指令,即可完成git push等操作
- 注意自己的ubantu,ROS 2版本要与教程的版本统一,否则有各种莫名其妙的错误
- 运行最后一个命令
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release会出现各种报错,主要是网络问题。选择稳定的节点多运行几遍就好了。耗时 2 小时以上,要有耐心
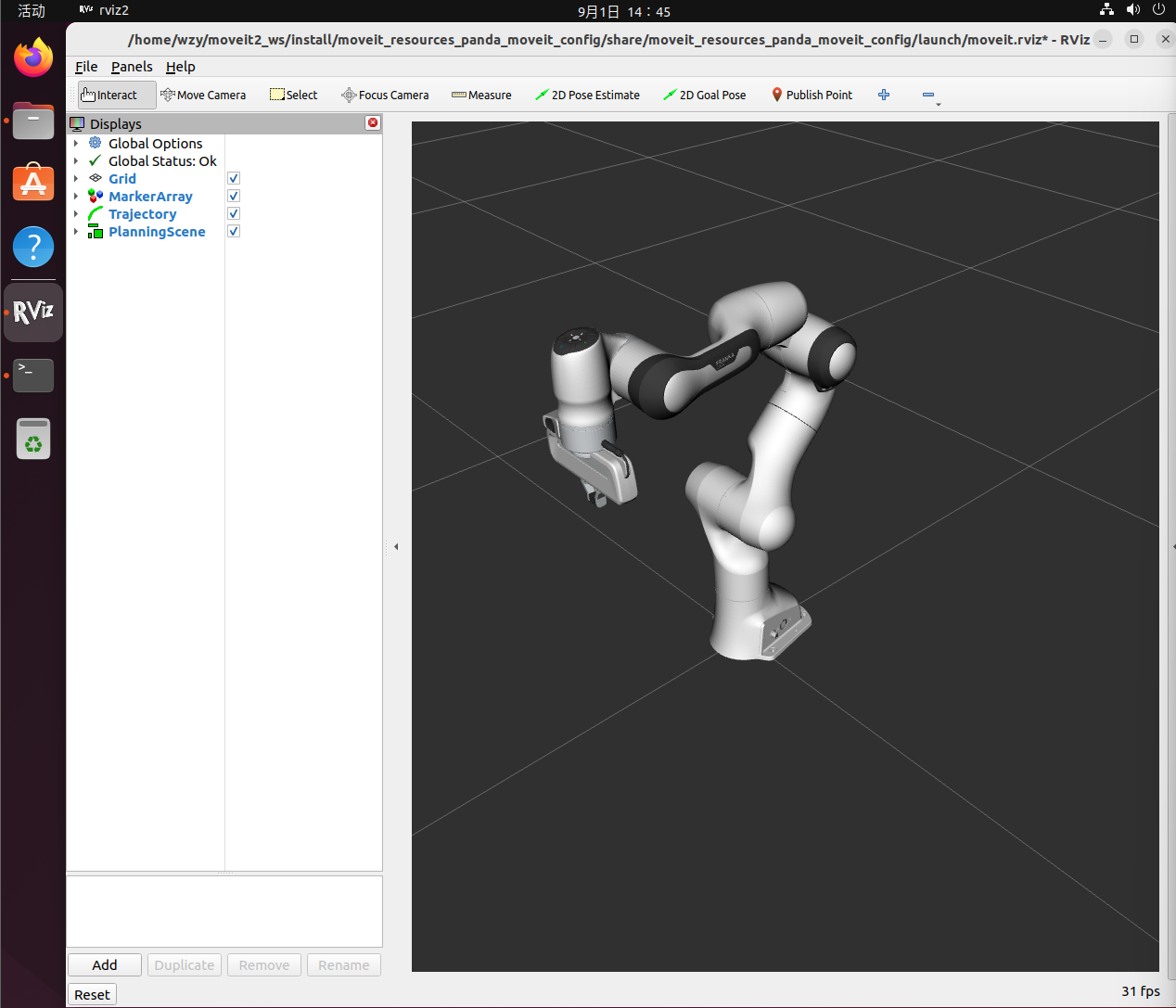
谢天谢地,终于安装好了。 启动命令:
cd moveit2_ws/
source install/setup.bash
ros2 launch moveit_resources_panda_moveit_config demo.launch.py
效果如下:
Gazebo 安装
这个简单,跟着教程做就好了
教程