本质上通过描述部件与链接连接部件的关节,构建机器人
示例代码
(其后缀是.urdf ,不是xml,用xml只是为了颜色好看)
<?xml version="1.0"?>
<robot name="first_robot">
<!-- 机器人的身体部分 -->
<link name="base-link">
<!-- 部件外观描述 -->
<visual>
<!-- 沿自己几何中心的偏移旋转量 -->
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<!-- 几何形状 -->
<geometry>
<!-- 圆柱体 半径 高度 -->
<cylinder radius="0.10" length="0.12"/>
</geometry>
<!-- 材质颜色 -->
<material name="white">
<!-- 红绿蓝透明度 -->
<color rgba="1.0 1.0 1.0 0.5"/>
</material>
</visual>
</link>
<!-- 机器人的IMU部件,惯性测量传感器 -->
<link name="imu-link">
<visual>
<origin xyz="0.0 0.0 0.06" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
<material name="blue">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</visual>
</link>
<!-- 机器人的关节,用于组合部件 -->
<joint name="imu_joint" type="fixed">
<!-- 关节父部件 -->
<parent link="base-link"/>
<!-- 关节子部件 -->
<child link="imu-link"/>
<!-- 固定位置 -->
<origin xyz="0.0 0.0 0.03" rpy="0.0 0.0 0.0"/>
</joint>
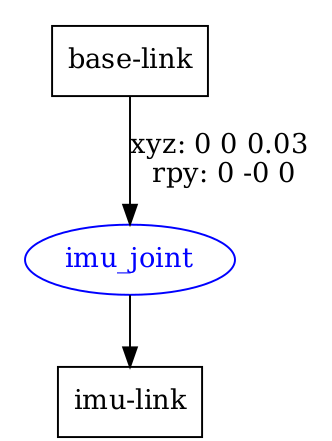
</robot>生成关系图
命令:
urdf_to_graphviz first_robot.urdf
生成 PDF 如图: